













충돌회피
충돌회피
| LiDAR | Stereo Camera | Ultrasonic Wave Sensor | IR TOF Sensor |
|---|---|---|---|
| Laser Transmit and Receive method | Multiple image analysis method | Ultrasonic wave transmit and receive method | IR transmit and receive method |
| Extended range and accurate detection | Accuracy decreases depends on distance | Suitable for near-range usage (within 10~20M) | Suitable for near-range use (within 10M) |
| Flight available in the rain and low visibility condition | Not suitable in darkness | Failure occurs relating to wires and branches | Sensitive to daylight (IR saturation)2019-04-16 |
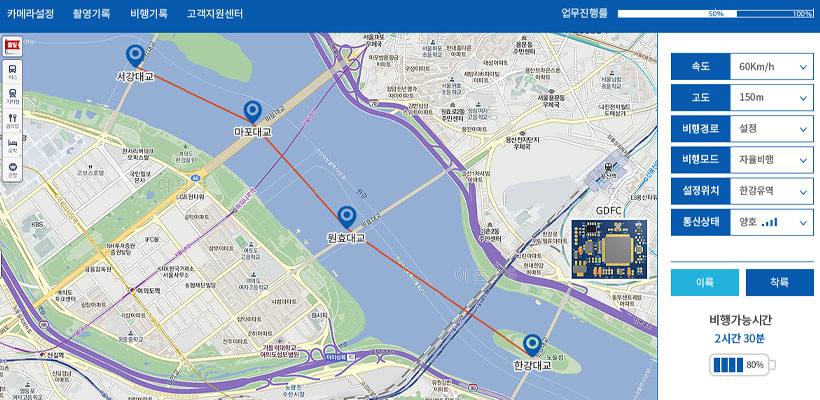
라이다와 FCS를 연계, 실시간 충돌 회피 솔루션 개발
충돌안전 시스템
실시간 장애물 탐지 : LiDAR 시스템 데이터 분석을 통한 장애물 감지
안전자율주행 시스템 : 드론 주위 지형지도 자체작성 및 GPS 미수신 지역에서의 주변 환경 인지를 통한 일시적 자동 비행
충돌 회피 알고리즘 : 획득된 라이다 벡터 데이터를 FCS에서 처리하여 충돌 가능성 평가 및 회피 경로 자동 탐색
